I kēia manawa, ʻo ka hapa nui o nā mea hana ma ka mākeke he ʻelua ʻano o ka mana mana ikaika:
1. Ka hoʻomalu ikaika loop o kēia manawa
He mea maʻalahi loa e hoʻokō i ke ʻano hoʻokele mana maʻamau, e ʻike i ka mana ikaika ma o ka hoʻoponopono ʻana i ke ʻano o loko o ka kaʻa.ʻO ka pōmaikaʻi, ʻoi aku ka paʻakikī o ka hoʻokō ʻana, a hiki ke hoʻokō i ka mana ikaika i loko o ka laulā o 5% -15% pololei;ʻO ka hemahema ʻo ia ka lohi o ka neʻe ʻana, ʻaʻole hiki ke hoʻohuli ʻia, ʻaʻole hiki ke hoʻokō i nā pono o kekahi mau hiʻohiʻona me nā koi kikoʻī kiʻekiʻe.Ma hope o ka manawa o ka hoʻohana ʻana, lawe mai ka mīkini mīkini i nā hewa a hoʻemi hou i ka pololei.
ʻAʻole loaʻa i kēlā mau mea hana nā mea ʻike, a inā he mau mea ʻike, hoʻohana wale ʻia lākou ma ke ʻano he "hōʻike" o ka ikaika a ʻaʻole komo i ka mana.No ka laʻana, e hoʻohui i kahi sensor i ka paʻi, heluhelu ka sensor i ka nui o ka ikaika, a hōʻike i ka waiwai ma o ka mika, i hoʻohana ʻia e kōkua i ka hoʻoponopono lima ʻana i ka nui o ka ikaika, akā ʻaʻohe mea e hana ai kēlā hoʻololi. me ka pololei o ka ikaika.

ʻAʻole pili i nā kiʻi a me nā kikokikona
2. ʻO ka mana hoʻomalu ikaika i pani ʻia
ʻO kekahi ʻano hana hoʻomalu ikaika ʻo ia ka hoʻohui ʻana i kahi mea ʻike ikaika maʻamau a me kahi algorithm hoʻokele paʻa-loop maʻamau.ʻO ka pōmaikaʻi ʻo ia ka hoʻomaikaʻi ʻana i ka pololei, akā ʻo ka hemahema ʻo ia ka lohi o ka wikiwiki.Ma kēia ala, hiki ke hoʻonui i ka pololei o ka mana ikaika mai 5% a i 1%.Inā ʻaʻohe kaʻina algorithm kūpono, a ʻaʻole lawa ka wikiwiki o ka sensor, hiki ke "overshoot".
Mea hoʻokele ikaika
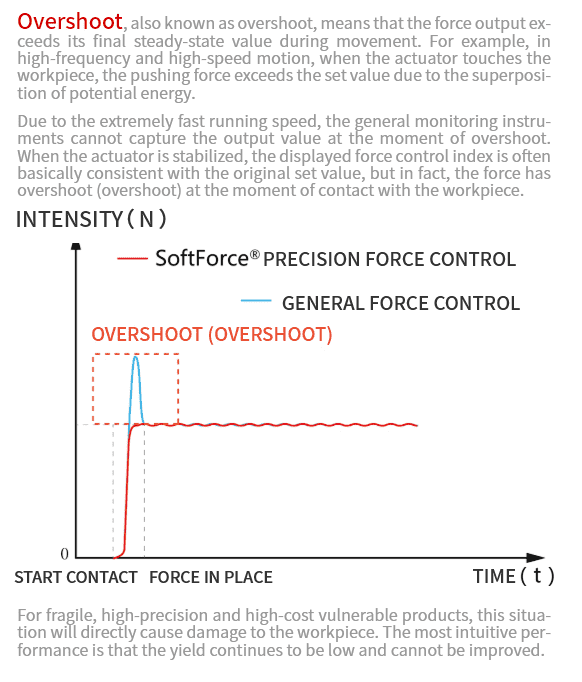
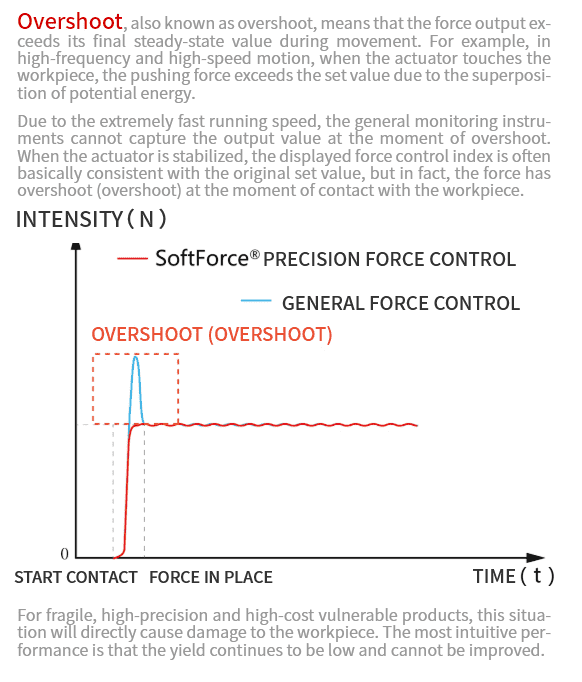
ʻO ka "overshoot" hikiʻole ke pale aku?
He paʻakikī ke ʻano o ka mana o ka sensor i ka hopena o ka hopena.ʻO ka hōʻike pololei loa ʻo ia ka "overshoot" maʻalahi loa e hana i ka wā e pili ana i nā hiʻohiʻona me nā koi kiʻekiʻe.
ʻo kahi laʻana
ʻO ka mea maʻamau, ma ke ʻano o ka wikiwiki kiʻekiʻe a me ka hoʻopuka nui, ʻo ka manawa e hoʻopili ai ka mea hana i ka mea hana he mea nui loa.No ka laʻana, inā hoʻonohonoho ʻia ka ikaika o ka mea hana i ka 10N, hiki ke maʻalahi i ka 11N a me 12N ke hoʻopā ʻo ia i ka mea hana, a laila kāhea ʻia ia i 10N ma o ka algorithm control.Kū pinepine ia mau pilikia i ka wā e hoʻohui ʻia ai nā mea ʻike ikaika a me nā mea i kapa ʻia ʻo ka ikaika-controlled actuators i ka mākeke.
ʻO kēia ka pilikia ʻaʻole lawa ka wikiwiki o ka pane.ʻO ka wikiwiki kiʻekiʻe a me ka pololei a me ka hoʻopuka paʻa he mau mea kū'ē i loko o lākou iho.Inā he overshoot (overshoot), ʻaʻohe manaʻo o ka ikaika pololei ma kahi.
ʻOi loa i ke kaʻina hana pono o ka hui puʻe, nā ʻāpana palupalu a me ke kumu kūʻai nui, ʻaʻole ʻae ʻia ka overshoot.
Ka mana ikaika piha, ke alapine kiʻekiʻe a me ka wikiwiki kiʻekiʻe me ka overshoot?
Pehea e hana ai ʻo TA?
No nā hiʻohiʻona noi kiʻekiʻe, ua hoʻohana ʻia ke ʻano "landing soft" e noʻonoʻo i nā koi o ka wikiwiki kiʻekiʻe a me ke kiʻekiʻe kiʻekiʻe, ʻo ia hoʻi, ka mana o ka mana.Hoʻokokoke koke ka mea hana i ka mea hana ma o ke ʻano neʻe kūlana, hoʻololi koke i ke ʻano mana ikaika ma ke kūlana kahi e pili ana i ka mea hana, a hoʻonui mālie i ka puka a hiki i ka waiwai i koho mua ʻia.ʻO ke kūlana kūlana + keʻano mana mana + ka manawa hoʻokūpaʻa ikaika,ʻo ka nui o ka manawa i hoʻohanaʻiaʻo ia ka hoʻokō pono hoʻokahi o ka mea hana.
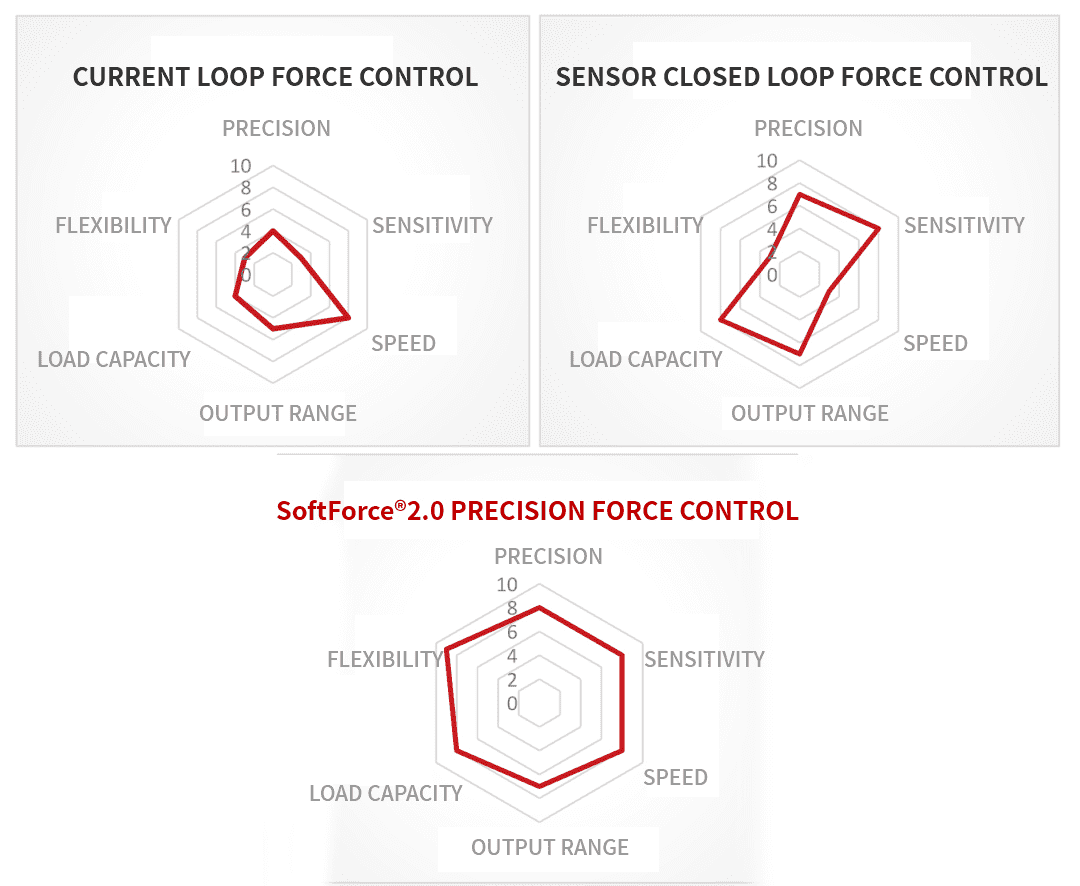
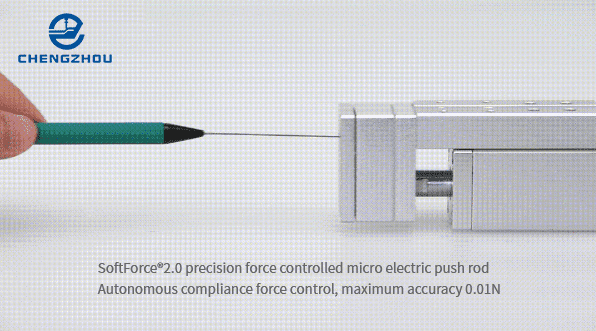
Hoʻohui pū ʻia me ka mea ʻike ikaika kiʻekiʻe a me ka algorithm precision precision control algorithm, SoftForce®2.0 precision force-controlled actuator hiki ke hoʻomaopopo ʻokoʻa i ke kūlana o ka mea hana a me ka mokuʻāina pili me ka mea hana, i hiki ai i ka mea hana, e like me ka hopena o ka automation. lako, he hana like me ka lima kanaka.ka ʻike maʻalahi, ka mana a me ka ʻike hoʻokō.
Ma ka mamao like, ua hoʻonui ʻia ka wikiwiki o ka pae ʻana o "SoftForce ®2.0 Precision Force Control", ʻoi aku ka nui o ka hoʻomanawanui, a hiki ke hoʻokō i ka mana piha piha, e hoʻomaikaʻi pololei ana i ka pōʻai hana a hoʻemi nui i ke kumukūʻai o ka hoʻokolokolo a hōʻoia hewa.
▋Kaʻina hana kiʻekiʻe e hoʻokō i ka hana ʻoi aku ka maikaʻi
ʻO ka pōʻaiapili helu o ka "six-axis force sensor + robot" hoʻolālā mana ikaika i hoʻohana maʻamau ʻia ma ka mākeke ʻo 5-10 milliseconds, ʻo ia hoʻi, ʻo ke alapine o ka hana ʻana he 100-200 Hz.Hiki i ke alapine hana o SoftForce®2.0 precision force-controlled actuators hiki ke hiki i ka 4000Hz (ie 0.25 milliseconds), a hiki i ke kiʻekiʻe-frequency series ke hiki i 8000Hz, ʻo ia ka 4-8 mau manawa o ka hana pinepine ʻana o nā mea hoʻokele ikaika-controlled robot.
▋Ka hoʻomalu ikaika kūpono, hiki ke hahai i ka hoʻololi o ka ikaika o waho
Hiki i ka mea hana ke pane koke aku i nā ikaika o waho a hoʻokō i ka mana hoʻokō ikaika.ʻOiai inā loaʻa nā mana o waho i ka wā o ka hana, hiki ke hoʻoponopono ʻia i ka manawa, e hana pololei ai ke kaʻina hana.ʻOi aku ka palekana o nā mea hana.
ʻO ke alapine kiʻekiʻe a me ka wikiwiki kiʻekiʻe me ka ʻole overshoot
ʻOiai ma lalo o ka neʻe kiʻekiʻe a me ka wikiwiki kiʻekiʻe, mālama mau ia i ka pololei o ka hoʻopuka kiʻekiʻe, a i ka manawa like e hōʻoia i ka "landing soft" a "no overshoot", pili i ka ʻili o nā ʻāpana me ka wikiwiki, ikaika liʻiliʻi, a hana maʻalahi. ʻohi a hoʻokomo ʻana i nā ʻāpana, a me nā mea ʻē aʻe, e pale aku i ka pōʻino i nā ʻāpana palupalu a palupalu.Nā ʻāpana.
ʻO SoftForce®2.0 Ka Mana Mana Pono
HF moʻo hoʻonui hou
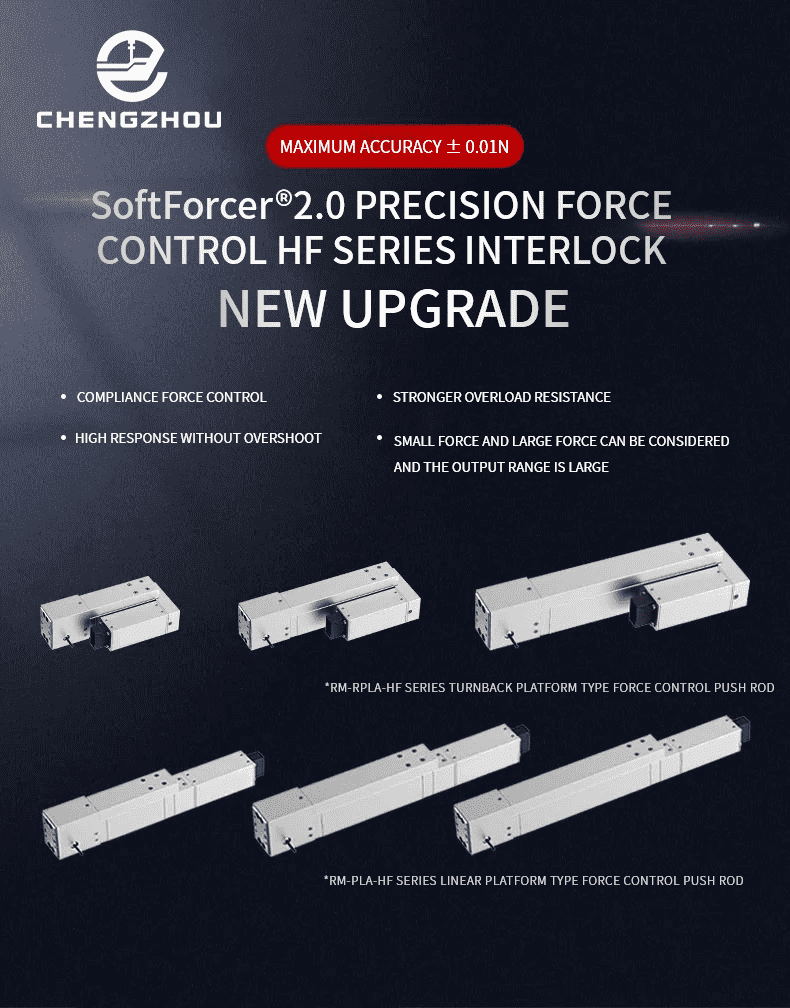
▋ ʻOi aku ka ikaika anti-overload
Ma muli o ka ʻike hohonu o ke kaʻina hana ma ka pūnaewele a me nā ʻike he nui, ua hoʻonui hou ʻia ka SoftForce®2.0 precision force control HF moʻo HF i Pepeluali i kēia makahiki, a ʻo kona hiki anti-overload he mau manawa kiʻekiʻe ma mua o ka. ka wā i hala, me ka lōʻihi kiʻekiʻe a me ka maʻalahi o ka hoʻohana.E kū i nā kūlana paʻakikī.
▋ Hiki ke noʻonoʻo i ka ikaika liʻiliʻi a me ka hoʻopuka nui
Hoʻolako ʻia me ka SoftForce®2.0 ʻōnaehana mana kiʻekiʻe, ʻo ka pākaukau paheʻe ikaika a me ka pahu pahu me ka hahau nui a me ka ukana nui hiki ke hoʻohua i ka ikaika liʻiliʻi a pololei ma lalo o ka ukana kiʻekiʻe, a hiki ke noʻonoʻo i ka ikaika ma ka like. manawa, a ʻoi aku ka laulā o ka puka.ʻOi aku ka nui, ʻo ia hoʻi, ʻoi aku ka ʻoi aku ka nui o ka ikaika dynamic range*.
*Puke Dynamic Range: ʻO ka lakio ma waena o ka ikaika kiʻekiʻe a me ka ikaika liʻiliʻi hiki ke hoʻopuka.
Hiki ke ho'ohana 'ia ka mana o ka pololei ma ka axis ho'okahi
ʻAʻole hiki ke hoʻohana wale ʻia nā mea hoʻokele ikaika ʻo SoftForce®2.0 i ka axis hoʻokahi, akā hāʻawi pū kekahi i nā mea hou aku no nā hoʻonā hui lehulehu.No ka laʻana, ʻo ka "RM Chengzhou 2D Synchronous Precision Force Control Platform Control System" hou loa i hoʻokuʻu ʻia e Chengzhou Technology i haku ʻia me ʻelua Chengzhou precision force-controlled actuators, hiki ke hoʻololi i ka ikaika o "six-axis sensor + robot" Control scheme, hoʻohana ʻia no ka wili pololei ʻana a me ka hoʻopau ʻana i ke ʻano o loko o nā kelepona paʻalima, etc.
Chengzhou 2D synchronous precision hoʻomalu mana papa ʻōnaehana mana
(Hoʻolako ʻia me SoftForce®2.0 ʻōnaehana hoʻomalu ikaika kiʻekiʻe)
ʻO nā lawelawe ʻoihana maʻalahi a maʻalahi hoʻi
ʻO ka algorithm mana kiʻekiʻe a me ke kaʻina hana debugging maʻalahi e lawe mai i ka ʻike mea hoʻohana maʻalahi i nā mea kūʻai aku.Hiki i ka mea hoʻohana me kahi haʻahaʻa haʻahaʻa ke hoʻomaka i loko o 5 mau minuke, ʻoiaʻiʻo "plug and play".
Ma ka manawa like, hiki i ka Chengzhou Technology ke 'oihana a me ka ikaika ma hope o ke kū'ai aku 'ana i ka 'ike loea 'oihana kāko'o i ka manawa mua, a'o, pilikia a me ka mālama 'ana.
Ua wiwo ʻole ʻo Chengzhou Technology e hoʻonui i kona mau palena.Me kona ikaika ʻenehana paʻa a me ka ʻenehana hou, ua hoʻomau ʻo ia i ka hoʻolaha ʻana i nā huahana actuator kiʻekiʻe kiʻekiʻe e hoʻolako i nā huahana kiʻekiʻe no ka hoʻopili semiconductor a me ka hoʻāʻo ʻana, 3C automation, precision manufacturing, smart medical a me nā ʻoihana ʻē aʻe.ʻāpana koʻikoʻi e like me nā ʻōnaehana hoʻokele pololei a me nā mea hana.
Ka manawa hoʻouna: Mei-31-2022