
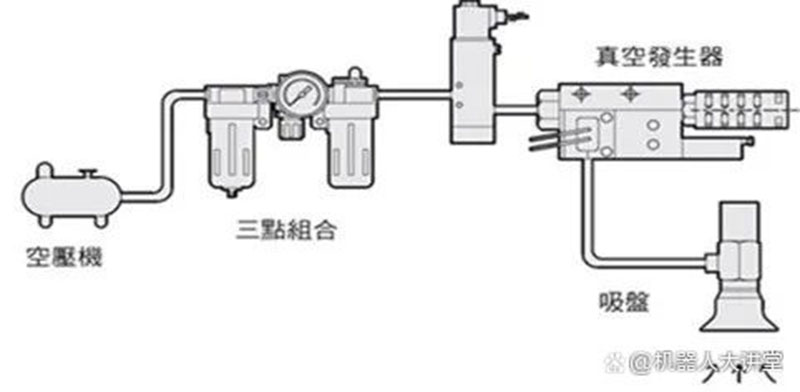
Mai ka hiʻohiʻona o ka hoʻolālā hana, ʻo ka hoʻokō ʻana i ka mīkini hana hoʻoheheʻe ka nui o ka mana electromagnetic control valve e hoʻomalu i ka mīkini hana hoʻomohala e ʻike ai i ka hoʻoulu ʻana a me ka hoʻōki ʻana, i mea e hoʻokō ai i ka hana o ka huki ʻana a me ka hoʻokuʻu ʻana i ka mea hana.
ʻO ka hopena, ʻo ka ʻōnaehana maʻamau e komo i kēia mau ʻāpana: 1. Puka ea kaomi;2. Kānana;3. Hoʻololi solenoid valve;4. Mea hoʻokele vacuum;5. E hoʻopau i ke kīʻaha hoʻoheheʻe, ka ʻeke ea, a me nā mea ʻē aʻe.
Eia kekahi, ma lalo o nā koi o ka automation ʻoihana, i mea e ʻike ai i ka nānā ʻana i ke kaʻina hana adsorption vacuum, hoʻohui pinepine kekahi mau mea hana i nā ʻāpana mana pneumatic e like me nā kahe kahe, nā hoʻololi ʻike kaomi, a me nā hoʻololi kokoke i ka ʻōnaehana i nā makahiki i hala.
Eia naʻe, no ka mea ua hoʻololi ʻia ka hapa nui o nā mea e ka mea hoʻohui e like me nā pono o ka mea kūʻai aku a me nā kūlana hana ma ka pūnaewele, pinepine ka paʻakikī o ka ʻōnaehana holoʻokoʻa.
I ka manawa like, alakaʻi nā mea hana he nui i ka hoʻonohonoho paʻakikī a me ka hoʻokō ʻana i ka hana ma ka pūnaewele, a ʻo kekahi o lākou he kiʻekiʻe ka ikehu a me ka 100% hilinaʻi i nā kumu kinoea.ʻAʻole hiki ke hoʻohui hapa
E hōʻalo i ka pollution leo, ʻo ia hoʻi nā pilikia hiki ʻole ke ʻae ʻia no nā kaiapuni kiʻekiʻe a me ka maʻemaʻe kiʻekiʻe e like me nā pā lithium a me nā semiconductors.
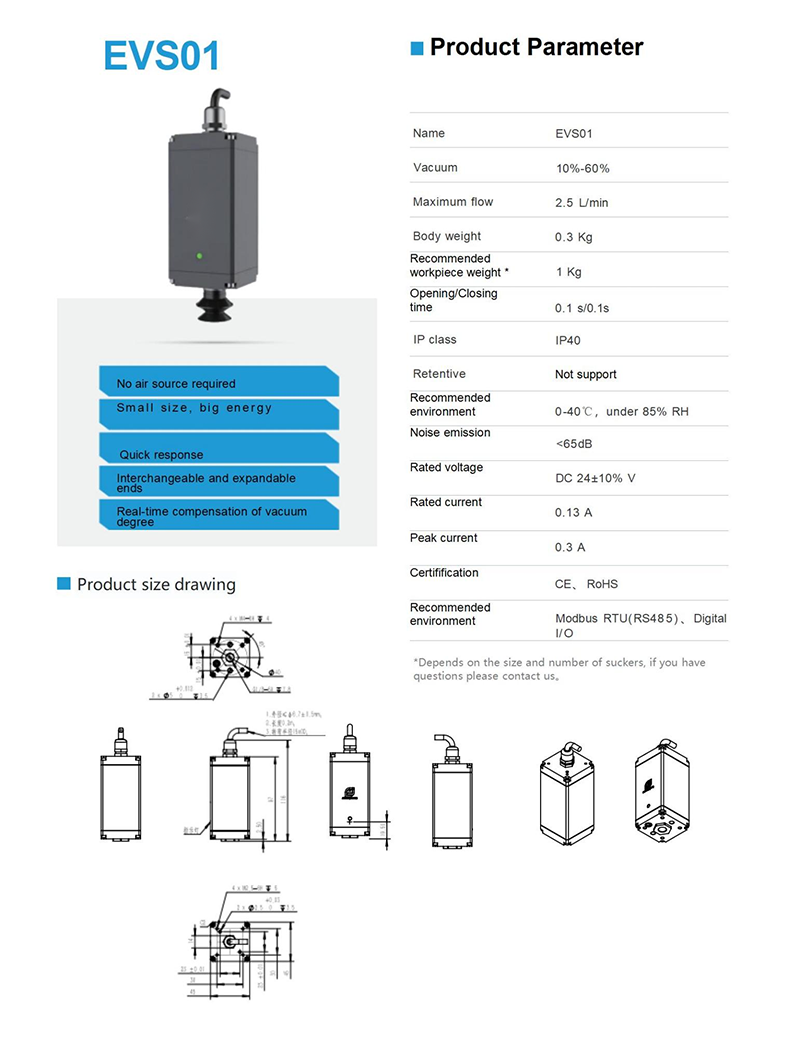
Ma ke ʻano holoʻokoʻa, ʻo EVS kahi hanauna hou o ka mea hoʻokele uila naʻauao ʻaʻole pono e koi i kahi kumu ea i hoʻopili ʻia, ʻaʻole kānalua ka maka.
ʻO ka pōmaikaʻi nui loa o ka ʻōnaehana mālama ea ʻo ia ka maʻalahi o ka hoʻokomo ʻana.No ka mea hiki i kēia ke hoʻohaʻahaʻa i ka nui o nā mea kōkua, me nā compressors ea, nā pahu mālama ea, nā lako hoʻomaʻemaʻe ea, a me nā paipu hoʻopuka, a me nā mea ʻē aʻe, e maʻalahi a maʻalahi hoʻi nā mea kūʻai aku e hoʻohana.
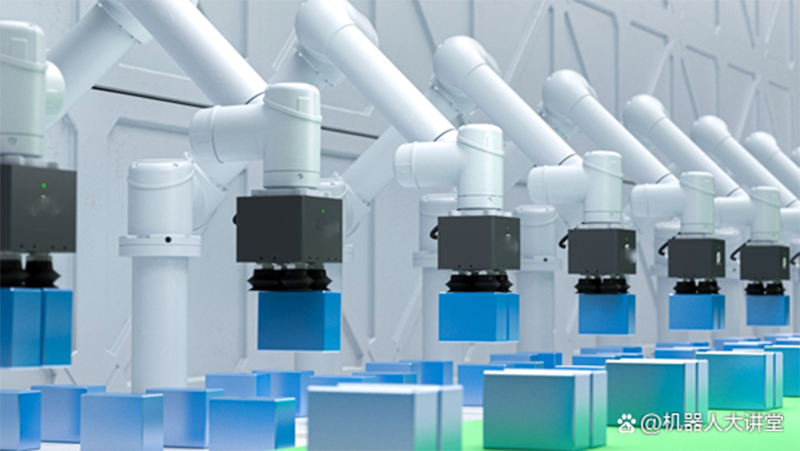
Ua hōʻike ʻia i kēia manawa, nui nā hiʻohiʻona e pili ana i nā platform robot mobile, 3C electronic assembly, lithium battery manufacturing, semiconductor manufacturing, express logistics, etc.
EVS08 suction square pākahiko
Nā kikoʻī hou aku a me nā pono
Ua aʻo ka hale haʻiʻōlelo robot e hiki ke piʻi i kahi kiʻekiʻe kiʻekiʻe o 10kg.Ma muli o ka hoʻolālā haʻahaʻa haʻahaʻa 24V, ʻo ka hoʻohana ʻana i ka ikehu he 20% o ka ʻōnaehana pneumatic maʻamau, a hiki ke hoʻonohonoho a hoʻoponopono ʻia ka ikaika adsorption ma ka hopena, a hiki i ka ikaika adsorption ke hiki i 102-510N.
Ma ke ʻano o ka hoʻolālā hoʻolālā, hoʻohana ʻo EVS i kahi hoʻolālā hoʻolālā ʻoi aku ka paʻakikī a me ka māmā, e hana ai ʻo EVS 30% ka liʻiliʻi ma mua o ka aerodynamics kuʻuna no ke kaumaha o ka ukana.
I ka manawa like, hiki ke hoʻopili pololei ʻia i ka mea hoʻohui ma ka hope o ka lima robotic, e hōʻemi ana i nā mea kōkua ʻē aʻe, e maʻalahi i ka hoʻohana ʻana, hiki ke hoʻopili koke ʻia, a hiki ke hoʻopaʻa maʻalahi i nā mea nui, kūpono loa ka hoʻopaʻa ʻana, ka lawelawe ʻana a me nā hana ʻē aʻe.
I mea e hoʻomaikaʻi ai i ka ʻoluʻolu o ka hoʻohana ʻana, ua loaʻa pū i ka mea hoʻokele uila uila kahi kikowaena hoʻohui, hiki ke hoʻohana ʻia e kāohi a nānā i ke kaʻina holoʻokoʻa o nā mea adsorbing.
Ua hōʻike ʻia ʻo ia no ka ʻoluʻolu o nā mea kūʻai aku e hoʻomalu i ke degere o ka mea hoʻokele ma o nā ʻōlelo kuhikuhi, a hoʻopili pū ma o ka loulou IO no ka nānā ʻana a me ka mālama wānana ʻana i ke kaʻina adsorption.ʻO ka nānā ʻana i ke kūlana e hōʻemi i nā hewa a me ka manawa haʻahaʻa a hōʻoia i ka loaʻa ʻana o ka ʻōnaehana.
Ma kēia kumu, ʻike ʻia nā mea maikaʻi a me nā hiʻohiʻona o EVS i kēia mau mea:
1. ʻO ka hoʻolālā paʻa a me ke kaumaha māmā: EVS he 30% ka liʻiliʻi ma mua o ka nui pneumatic maʻamau i ka wā e komo ai i ke kaumaha like o ka ukana.Hiki ke hoʻopili ʻia me ka mea hoʻohui ma ka hope o ka lima mechanical e ʻike i ka absorption o ka ukana, kūpono loa no ka hoʻopaʻa ʻana, ka lawelawe ʻana a me nā hana ʻē aʻe;
2. Nui ka hoʻonohonoho hoʻonohonoho ʻana: Hiki ke hoʻonohonoho ʻia nā ʻano kīʻaha hoʻoheheʻe, nā ʻeke air a me nā mea ʻē aʻe e ʻike ai i ka hopu ʻana i nā mea like ʻole, me nā ʻāpana ʻāpana, spherical a me nā ʻano kūikawā;
3. Hiki ke hoʻomalu ponoʻia nā kaha lua: e hoʻomalu maʻalahi i kaʻaoʻao hema a me ka'ākau o ka mea hoʻokele vacuum, a ua kūʻokoʻa nāʻaoʻaoʻelua i kekahi i kekahi, e hoʻomaikaʻi hou i ka pono hana o ka laina hana.Hoʻomaopopo ia i ka hoʻomoʻa ʻana a me ka hoʻokomo ʻana i ka manawa like, e hoʻomaʻamaʻa nui i ka mālama ʻana a me ka hoʻokaʻawale ʻana i nā mea, mālama i ka manawa a me ka manawa;
4. Hiki ke hoʻololi ʻia ke kiʻekiʻe o ka momi e like me nā hiʻohiʻona o ka huahana omo, a hiki ke hoʻokō ʻia ka uku ʻana i ka manawa maoli;
5. Manaʻo manaʻo: Loaʻa iā ia kahi mea ʻike manaʻo ʻana, hiki ke ʻike i ke kūlana adsorption o nā mea i ka manawa maoli, a hāʻawi i ka manaʻo a me ka alarm;
6. Ka pale ʻana i ka mana: Ma hope o ka hoʻopau ʻana i ka mana, hiki iā ia ke hoʻomaopopo i ka adsorption power-off paʻa ponoʻī e pale i nā mea adsorbed;
7. Hiki ke hoʻololi ikaika: kākoʻo 24V I / O a me MODBUS RTU (RS485) kaʻina kamaʻilio;
8. E maʻalahi ka hoʻouka a me ka debug: maʻalahi a hiki ke heluhelu ʻia ka protocol kamaʻilio, e hōʻemi nui ana i ka paʻakikī o ka debugging.Eia kekahi, hiki ke hoʻopili ʻia ka polokalamu debugging computer host ma ke ʻano he makana, hiki ke hoʻonohonoho a hoʻoponopono ʻia e hoʻonohonoho i nā ʻāpana hana ma waho.
Ka hopena a me ka wā e hiki mai ana
Ma lalo o ke ʻano o ka automation a me ka naʻauao, ua lilo nā mea hana uila uila i mea koʻikoʻi e hōʻoia i ka hana maʻamau o nā robots a me nā ʻōnaehana automation, e ʻoi aku ka maʻalahi o ka hoʻohana ʻana i nā ʻōnaehana actuator uila, a hiki ke hoʻokō i nā hiʻohiʻona like ʻole e like me nā lopako haku mele paʻa..
Hiki ke hoʻomaikaʻi hou i ka hilinaʻi o nā ʻāpana koʻikoʻi o ka robot, e hoʻemi i ka hoʻokuʻu hana a me nā pilikia hoʻoneʻe mamao no nā mea hoʻohana hope, a e hōʻemi hou i nā kumukūʻai mālama a ma hope o ke kūʻai aku.
Ka manawa hoʻouna: Apr-19-2023