ʻO kahi ʻenekona ikaika ʻeono me kahi ʻāpana manawa piʻo nui KWR116 ʻeono axis sensor



● wehewehe huahana
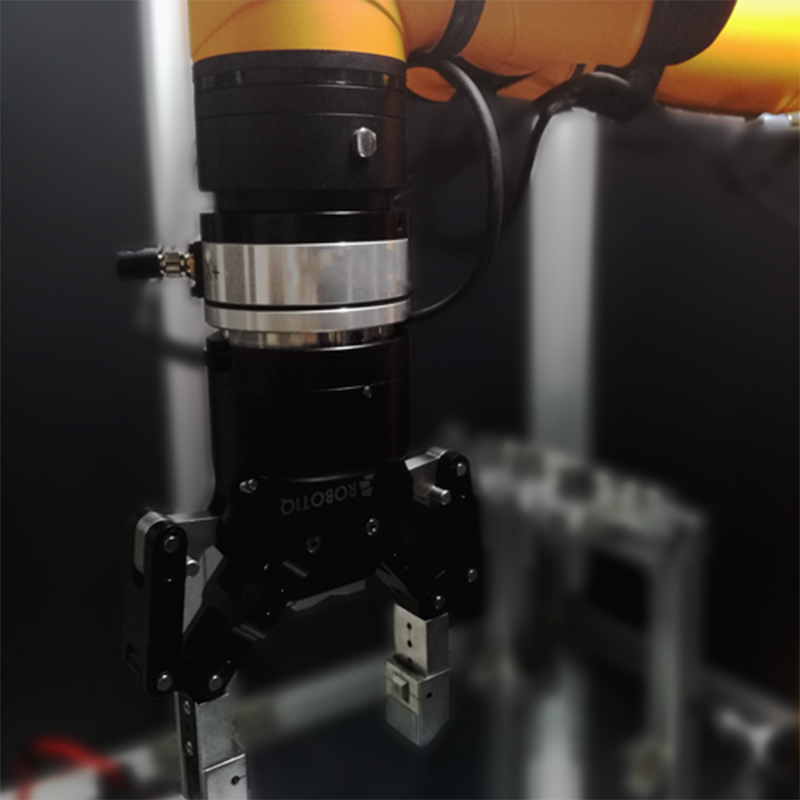
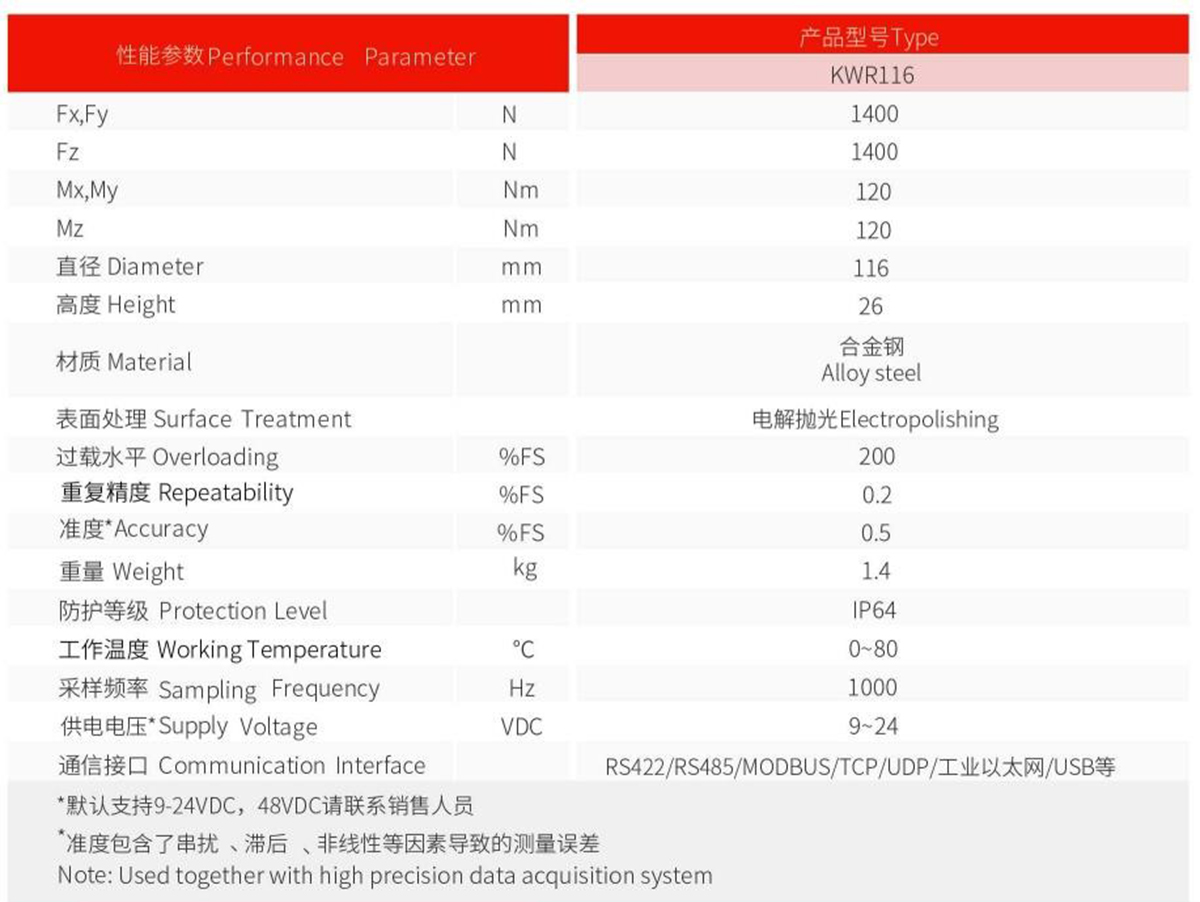
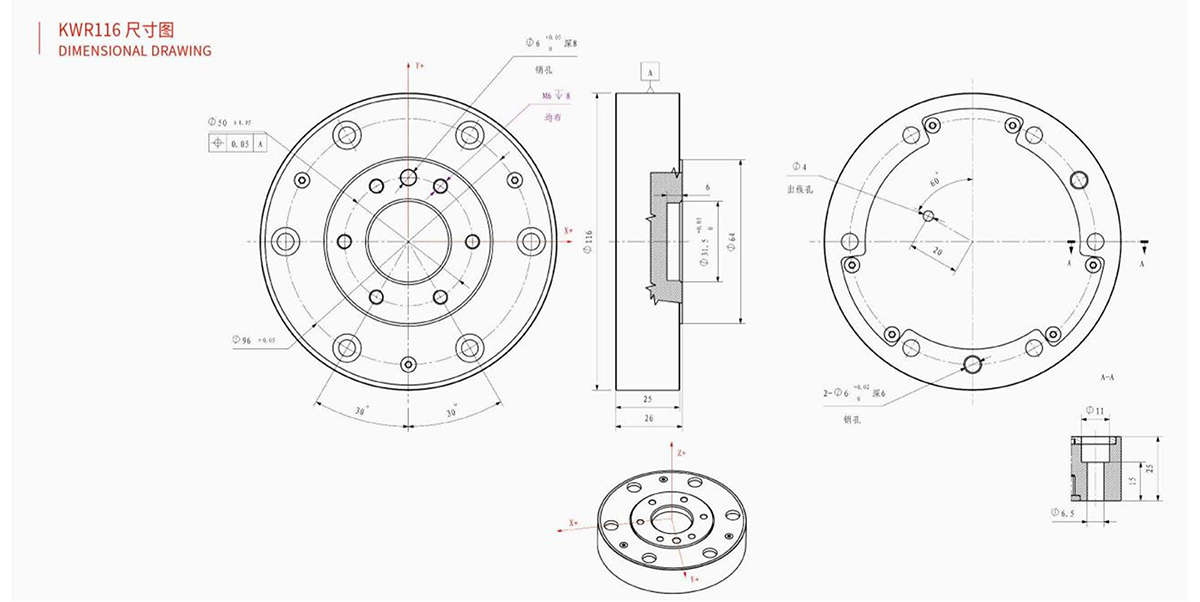
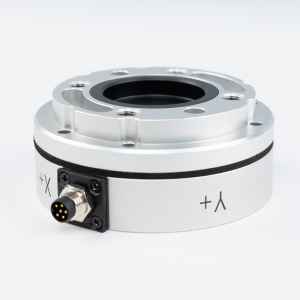
ʻO KWR116 ʻeono-axis force sensor he ʻeono-dimensional force sensor me ka nui o ka manawa piko.Ua kūkulu ʻia i loko o nā kaapuni akamai i hoʻopili ʻia, hiki ke ana a hoʻopuka i nā mana a me nā manawa i ʻekolu ʻaoʻao i ka manawa maoli.ʻO ka mea huahana he kila kila ikaika, e kū ana i nā koi hoʻokomo o nā mea hana kino kino.Ua hoʻohana ʻia ma ke kahua o ka nānā ʻana o ka lumi ʻikepili a me ka hoʻāʻo ʻana i nā lako uila uila kiʻekiʻe o waho.
1, ʻEono-axis joint calibration, hoʻopau loa i ka crosstalk
2, i kūkulu ʻia i loko o ke kiʻekiʻe kiʻekiʻe i hoʻokomo ʻia i ka ʻōnaehana hoʻoili ʻikepili
3, ʻO ka mana overload ikaika, kūpono no ke ana manaʻo ikaika o nā hopena hopena robot me nā lōʻihi nui
4, Ke hoʻohana nei i ka alloy ikaika kiʻekiʻe (martensitic stainless steel), kiʻekiʻe overload, rigidity kiʻekiʻe a me ka ʻike kiʻekiʻe.


Māhele huahana
-

KWR200 Series Force Sensor for Robot Base Multi...
-
6 cell triple force 6-axis six-dimensional haawe...
-

E ana i ka ikaika a me ka torque ma na ana eono Eono-...
-

6 Axis Force ʻenekona hoʻouka ʻana ʻeono-A...
-

Chengzhou 6 Axis Force sensor dimensional haawe ...
-

KWR90 ikaika sensor no ka 'oihana 'oihana, r...





