ʻO Chengzhou 6 Axis Force ʻenekona hoʻouka ʻana i ka nui ʻeono-Axis Torque Sensor KWR46 SERIES no Robotics



● wehewehe huahana
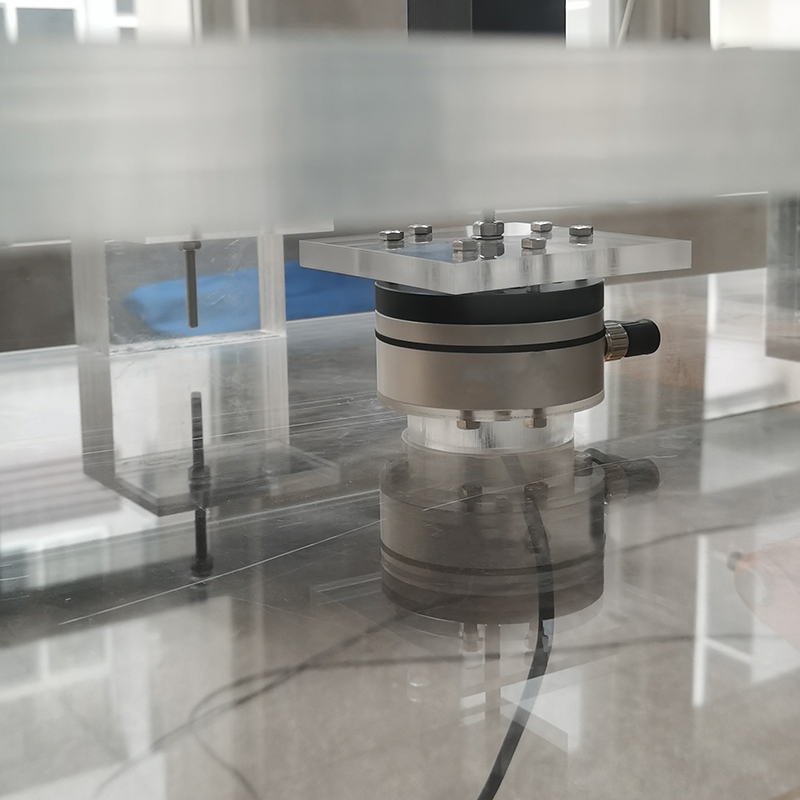
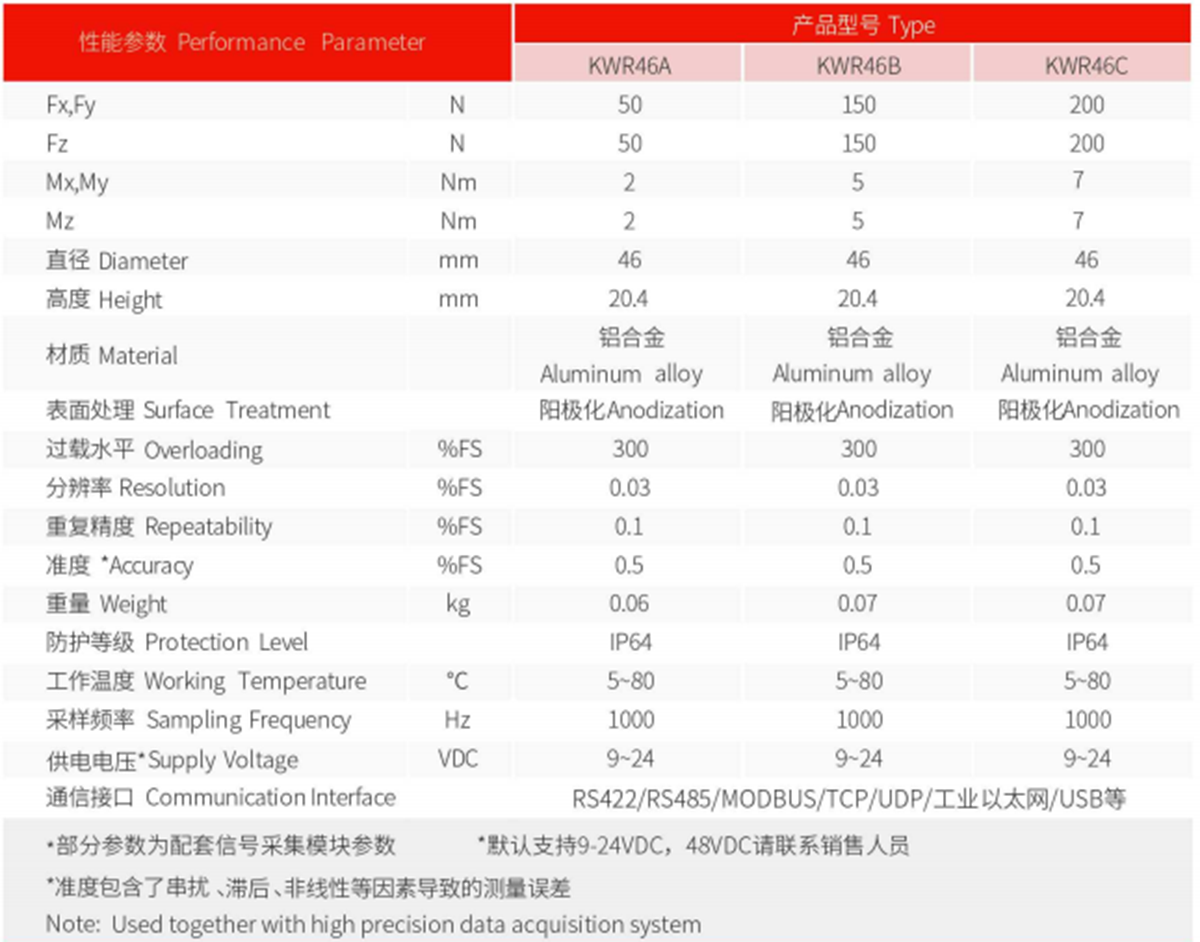
Ke hoʻohana nei i ka alloy aviation, kiʻekiʻe overload, kiʻekiʻe rigidity a kiʻekiʻe sensitivity KWR46 series six-axis force sensor kahi mea ʻike kiʻekiʻe kiʻekiʻe kiʻekiʻe, hiki ke ana i ka ikaika a me ka manawa i ʻekolu mau kuhikuhi orthogonal i ka manawa maoli.Hoʻolālā ʻia ka mea ʻike ma muli o ke kumu o ke ana uila, a hoʻohana i ka ʻenehana calibration hui ʻeono axis e hoʻomaikaʻi i ka pololei.Hiki ke hoʻopili pono ʻia me nā modules loaʻa hōʻailona like ʻole e ʻike i nā ʻano kamaʻilio e like me RS422, RS485, CAN, USB a me Ethernet ʻoihana, a hoʻohana nui ʻia i ka hoʻāʻo ʻana i ka lāʻau lapaʻau, nā robots liʻiliʻi liʻiliʻi, ke ana ʻana, ka hoʻāʻo aerospace a me nā kahua ʻē aʻe.
1. ʻEono-axis joint calibration hoʻopau loa i ka crosstalk
2. ʻAiʻi kiʻekiʻe kiʻekiʻe kiʻekiʻe eono-axis ikaika sensor